Fraunhofer Center for Maritime Logistics and Services
Fraunhofer Center for Maritime Logistics and Services


Project Description
Project Goals:
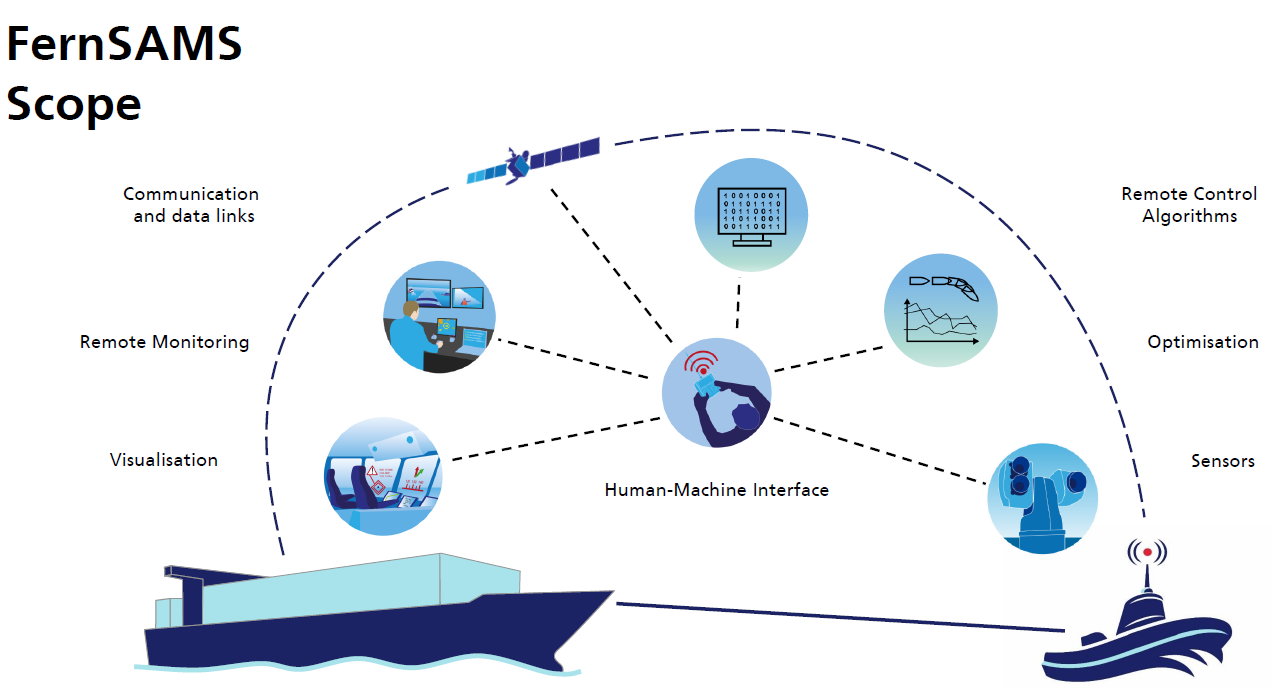
Advanced communications and modern control technologies offer new opportunities for waterborne and shore-based maneuver coordination. The FernSAMS project - deployment of remote-controlled tugs during berthing maneuvers of large ships - takes advantage of these. In the future, unmanned tugs, so-called RoboTugs, will handle these maneuvers, which are not without danger. The highly qualified personnel will control the tug operations from shore and can additionally make more efficient use of today's often long waiting times.
Objectives:
FernSAMS takes a comprehensive approach: all tasks of tug operations such as automated line handling, communication and data exchange as well as shore-based support, seafarer training and maneuver optimization through a simulation model are considered in the project.
Role of the CML in FernSAMS:
At the CML, the project will pay special attention to achieving realistic situational awareness in the remote control environment. Augmented reality visualization will be used to augment the real tug's field of view with virtual displays that will provide personnel with the information they need to safely implement maneuvers from a shore station. For this purpose, innovative approaches of augmented reality are applied using the latest knowledge from the gaming industry.
Project consortium:
Partners are Voith Turbo GmbU & Co. KGaA (project management), McGregor GmbH, TU Hamburg, BAW Bundesanstalt für Wasserbau, MTC Maritime Training Center Hamburg GmbH as well as Media Mobil Communication GmbH and Fraunhofer CML.