Fraunhofer Center for Maritime Logistics and Services
Fraunhofer Center for Maritime Logistics and Services



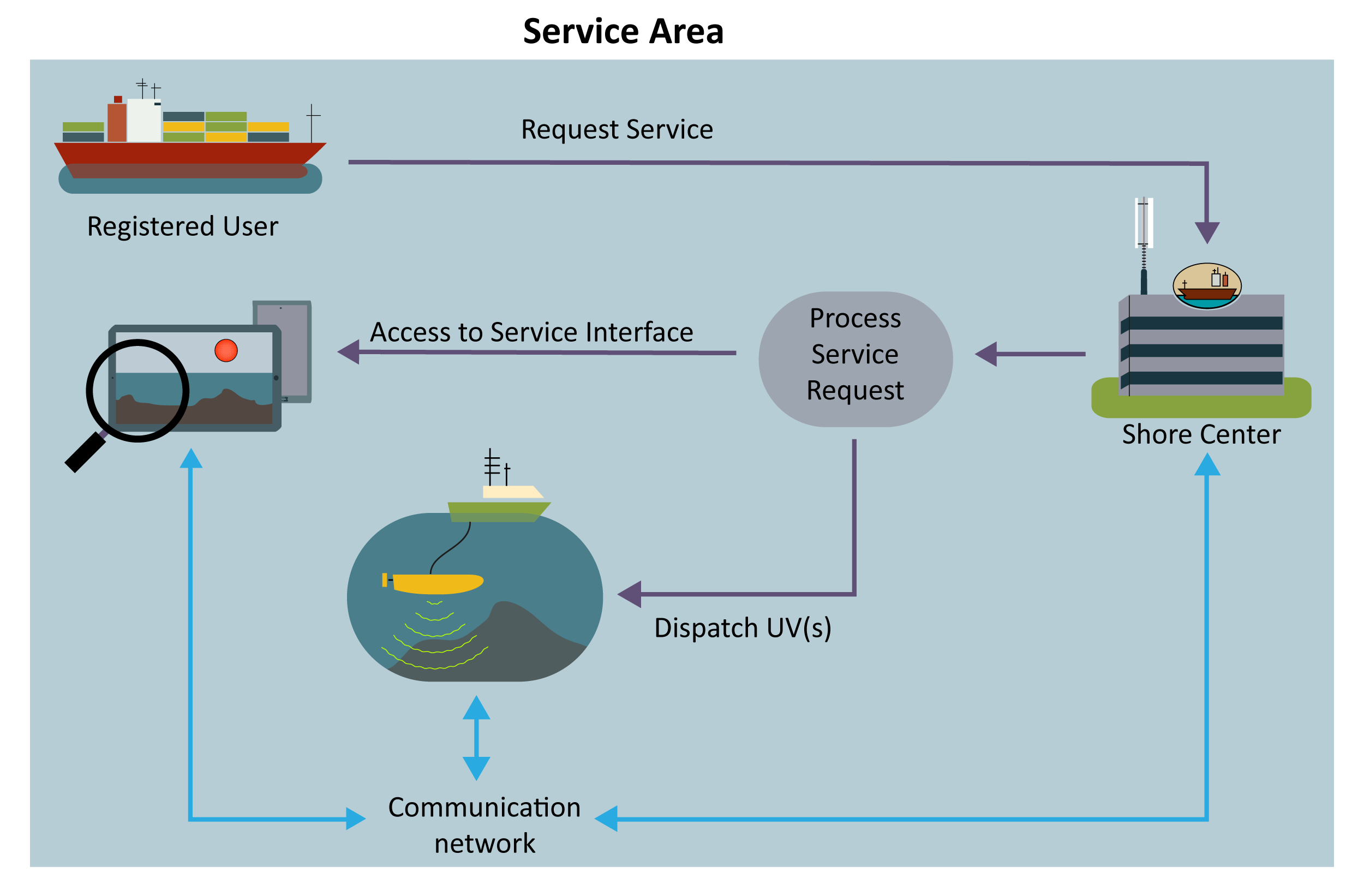
Project Description
Project Goals:
To make maritime operations in coastal waters more efficient and safer through the integration and networking of smaller unmanned surface and underwater vessels and to offer new services for shipping.
Objectives:
Underwater inspections of ship hulls - so far divers are required for this, or a stay in dry dock. But also the real time capable, predictive depth measurement of fairways to avoid ground contact is only sporadically carried out nowadays due to the technological effort. However, difficult and costly operations for maintenance, salvage or repair under water as well as navigation in demanding, dynamic waters could be carried out in a more targeted manner by using small autonomous units for information acquisition. The project partners of RoboVaaS - Robotic Vessels as a Service - have set themselves the goal of developing such units.
Role of the CML in RoboVaaS:
The CML leads the project RoboVaaS and develops the control software for the ASV as well as a web-based control software. Our test ship SeaML is further developed to fit the RoboVaaS´needs.
Project Consortium:
Fraunhofer Center for Maritime Logistics and Services CML, Germany (project management), TUHH smartPORT, Hamburg Port Authority, Kraken Robotik GmbH, University of Padova, SIGNET (Italy), SonarSim, University of Limerick, CRIS (Ireland)