Fraunhofer-Center für Maritime Logistik und Dienstleistungen
Fraunhofer-Center für Maritime Logistik und Dienstleistungen 


Projektdarstellung
Ziele:
Fortschrittliche Kommunikation und moderne Steuerungstechniken bieten neue Möglichkeiten für die wasser- und landgestützte Manöverkoordination. Das Projekt FernSAMS - Einsatz ferngesteuerter Schlepper bei An- und Ablegemanövern großer Schiffe - macht sich diese zunutze. In Zukunft sollen unbemannte Schlepper, sogenannte RoboTugs, diese nicht ungefährlichen Manöver erledigen. Das hoch qualifizierte Personal steuert die Schleppereinsätze von Land aus und kann dabei zusätzlich die heute oft langen Wartezeiten effizienter nutzen.
Projektgegenstand:
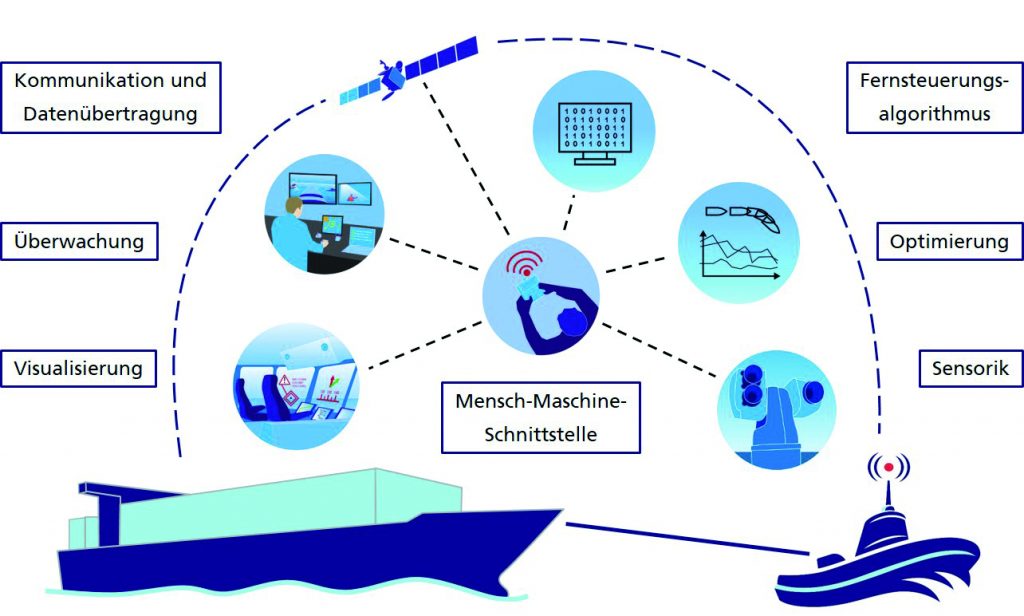
FernSAMS verfolgt dabei einen umfassenden Ansatz: sämtliche Aufgaben des Schleppereinsatzes wie automatisiertes Leinenhandling, Kommunikation und Datenaustausch sowie landseitige Unterstützung, Schulung der Seeleute und Manöveroptimierung durch ein Simulationsmodell werden in dem Projekt betrachtet.
Rolle des CML in FernSAMS:
Am CML wird in dem Projekt ein besonderes Augenmerk auf die Erzielung eines realistischen Situationsbewusstseins in der Fernsteuerungsumgebung gelegt. Durch eine Augmented Reality-Visualisierung wird das reale Schleppersichtfeld durch virtuelle Anzeigen erweitert, welche dem Personal die nötigen Informationen bieten, um von einer Landstation aus die Manöver sicher umzusetzen. Dazu werden innovative Ansätze der Augmented Reality unter Verwendung neuester Erkenntnisse aus der Spieleindustrie eingesetzt.
Projektkonsortium:
Partner sind Voith Turbo GmbU & Co. KGaA (Projektleitung), McGregor GmbH, die TU Hamburg, die BAW Bundesanstalt für Wasserbau, das MTC Maritime Training Center Hamburg GmbH sowie die Media Mobil Communication GmbH und das Fraunhofer CML.