Fraunhofer-Center für Maritime Logistik und Dienstleistungen
Fraunhofer-Center für Maritime Logistik und Dienstleistungen 



Projektdarstellung
Ziele:
Maritime Operationen in Küstengewässern durch die Einbindung und Vernetzung von kleineren unbemannten Über- und Unterwassereinheiten effizienter und sicherer gestalten und neue Dienste für die Schifffahrt anbieten.
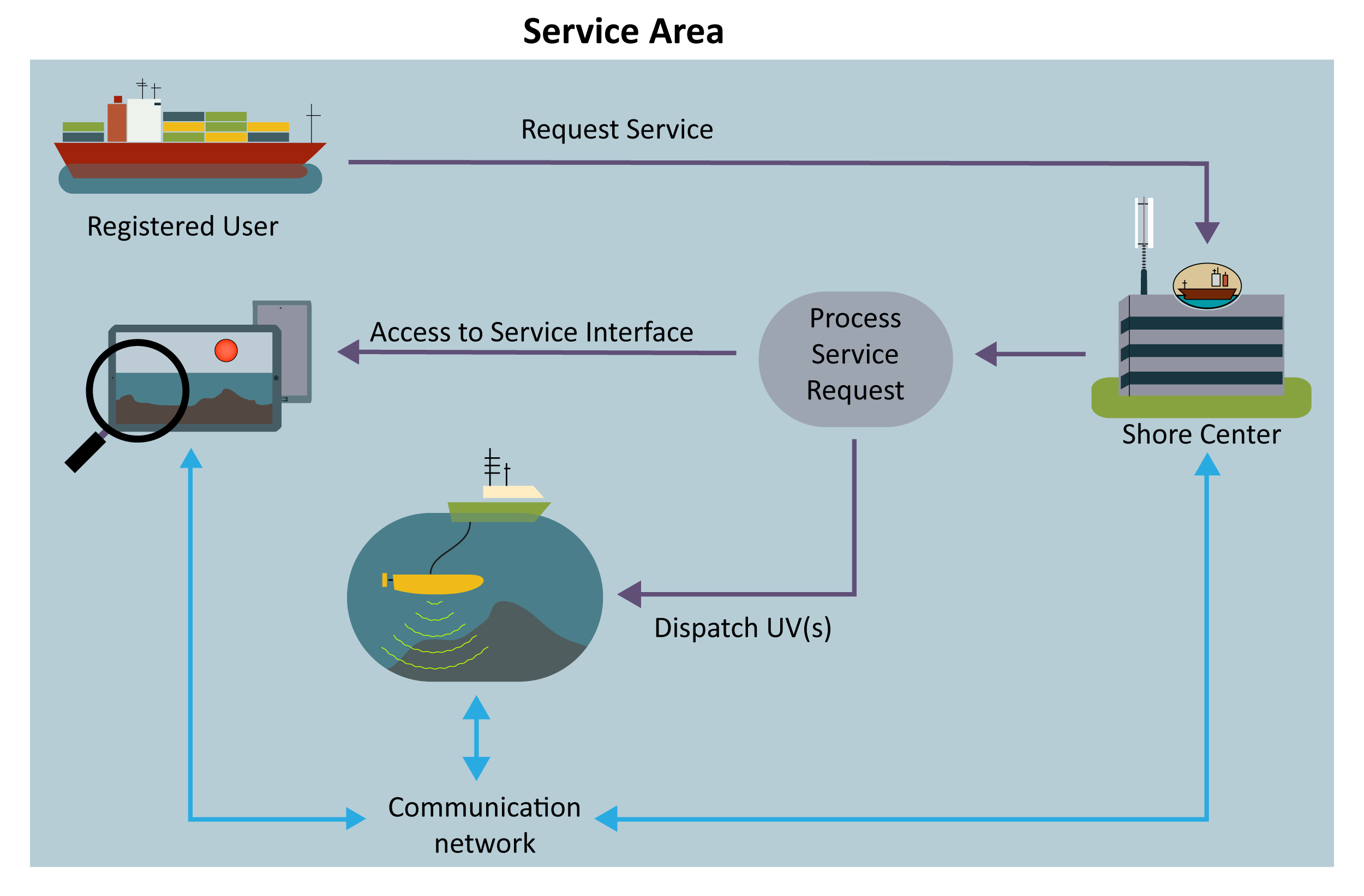
Projektgegenstand:
Unterwasserinspektionen von Schiffsrümpfen – bislang sind hierfür Taucher erforderlich, oder ein Aufenthalt im Trockendock. Aber auch die echtzeitfähige, vorausschauende Tiefenmessung von Fahrwassern zur Grundberührungsvermeidung erfolgen aufgrund des technologischen Aufwands heutzutage nur sporadisch. Dabei könnten schwierige und aufwendige Einsätze zur Wartung, Bergung oder Reparatur unter Wasser sowie Navigation in anspruchsvollen, dynamischen Gewässern durch den Einsatz kleiner autonomer Einheiten für die Informationsgewinnung gezielter erfolgen. Die Entwicklung derartiger Einheiten haben sich die Projektpartner von RoboVaaS – Robotic Vessels as a Service - zum Ziel gesetzt.
Rolle des CML in RoboVaaS
Das CML leitet das Projekt RoboVaaS. Am CML werden die Steuersoftware für das ASV sowie eine web-basierte Kontrollsoftware programmiert und ein bestehender Prototyp weiterentwickelt.
Projektkonsortium:
Fraunhofer-Center für Maritime Logistik und Dienstleistungen CML, Deutschland (Projektleitung), TUHH smartPORT, Hamburg Port Authority, Kraken Robotik GmbH, University of Padova, SIGNET (Italien), SonarSim, University of Limerick, CRIS (Irland)